
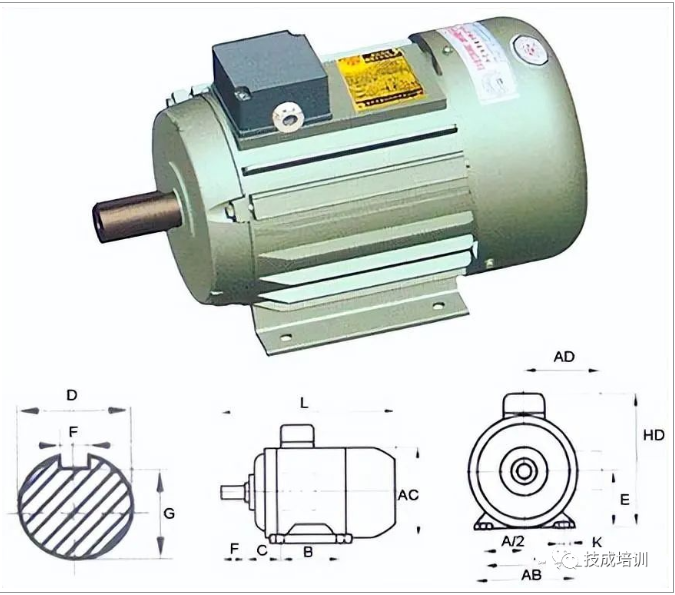
Kolmivaiheinen asynkroninenmoottorion oikosulkumoottorityyppi, joka saa virtaa kytkemällä samanaikaisesti 380 V kolmivaiheinen vaihtovirta (vaihe-ero 120 astetta). Koska kolmivaiheisen asynkronisen moottorin roottorin ja staattorin pyörivä magneettikenttä pyörivät samaan suuntaan ja eri nopeuksilla, on luistonopeus, joten sitä kutsutaan kolmivaiheiseksi asynkroniseksi moottoriksi.
Kolmivaiheisen asynkronisen moottorin roottorin nopeus on pienempi kuin pyörivän magneettikentän nopeus. Roottorin käämitys tuottaa sähkömotorista voimaa ja virtaa suhteellisesta liikkeestä magneettikentän kanssa, ja se on vuorovaikutuksessa magneettikentän kanssa sähkömagneettisen vääntömomentin muodostamiseksi, jolloin saadaan aikaan energian muunnos.
Verrattuna yksivaiheiseen asynkroniseenmoottorit, kolmivaiheinen asynkroninenmoottoritniillä on parempi toimintakyky ja ne voivat säästää erilaisia materiaaleja.
Eri roottorirakenteiden mukaan kolmivaiheiset asynkroniset moottorit voidaan jakaa häkkityyppiin ja kierretyyppiin
Häkkiroottorilla varustetulla asynkronisella moottorilla on yksinkertainen rakenne, luotettava toiminta, kevyt paino ja alhainen hinta, jota on käytetty laajalti. Sen suurin haittapuoli on nopeuden säätelyn vaikeus.
Kierretyn kolmivaiheisen asynkronisen moottorin roottori ja staattori on myös varustettu kolmivaiheisilla käämeillä ja kytketty ulkoiseen reostaattiin liukurenkaiden, harjojen kautta. Reostaatin vastuksen säätäminen voi parantaa moottorin käynnistystä ja säätää moottorin nopeutta.
Kolmivaiheisen asynkronisen moottorin toimintaperiaate
Kun kolmivaiheiseen staattorikäämiin johdetaan symmetrinen kolmivaiheinen vaihtovirta, syntyy pyörivä magneettikenttä, joka pyörii myötäpäivään pitkin staattorin ja roottorin sisäkehätilaa synkronisella nopeudella n1.
Koska pyörivä magneettikenttä pyörii n1 nopeudella, roottorin johdin on alussa paikallaan, joten roottorin johdin katkaisee staattorin pyörivän magneettikentän tuottaakseen indusoituneen sähkömotorisen voiman (indusoituneen sähkömotorisen voiman suunnan määrää oikea käsi sääntö).
Koska roottorijohtimen molemmissa päissä on oikosulku oikosulkurenkaalla, indusoituneen sähkömotorisen voiman vaikutuksesta roottorijohdin kehittää indusoituneen virran, joka on periaatteessa samansuuntainen kuin indusoitunut sähkömotorinen voima. Roottorin virtaa kuljettavaan johtimeen kohdistuu sähkömagneettinen voima staattorin magneettikentässä (voiman suunta määritetään vasemman käden säännöllä). Sähkömagneettinen voima synnyttää sähkömagneettisen vääntömomentin roottorin akseliin, jolloin roottori pyörii pyörivän magneettikentän suuntaan.
Yllä olevan analyysin perusteella voidaan päätellä, että sähkömoottorin toimintaperiaate on seuraava: kun moottorin kolmivaiheisiin staattorikäämeihin (joissa kummassakin 120 asteen sähkökulmaero) syötetään kolmivaiheista symmetristä vaihtovirtaa. , syntyy pyörivä magneettikenttä, joka katkaisee roottorin käämin ja tuottaa indusoituneen virran roottorin käämiin (roottorikäämi on suljettu piiri). Virtaa kuljettava roottorin johdin tuottaa sähkömagneettista voimaa staattorin pyörivän magneettikentän vaikutuksesta, jolloin moottorin akseliin muodostuu sähkömagneettinen vääntömomentti, joka saa moottorin pyörimään samaan suuntaan kuin pyörivä magneettikenttä.
Kolmivaiheisen asynkronisen moottorin kytkentäkaavio
Kolmivaiheisten asynkronisten moottoreiden perusjohdotus:
Kolmivaiheisen asynkronisen moottorin käämityksen kuusi johtoa voidaan jakaa kahteen peruskytkentätapaan: kolmio-kolmioliitäntä ja tähtiliitäntä.
Kuusi johtoa=kolme moottorikäämiä=kolme päätä+kolme takapäätä, yleismittarilla, joka mittaa liitoksen saman käämin, eli U1-U2, V1-V2, W1-W2, pään ja takapäiden välillä.
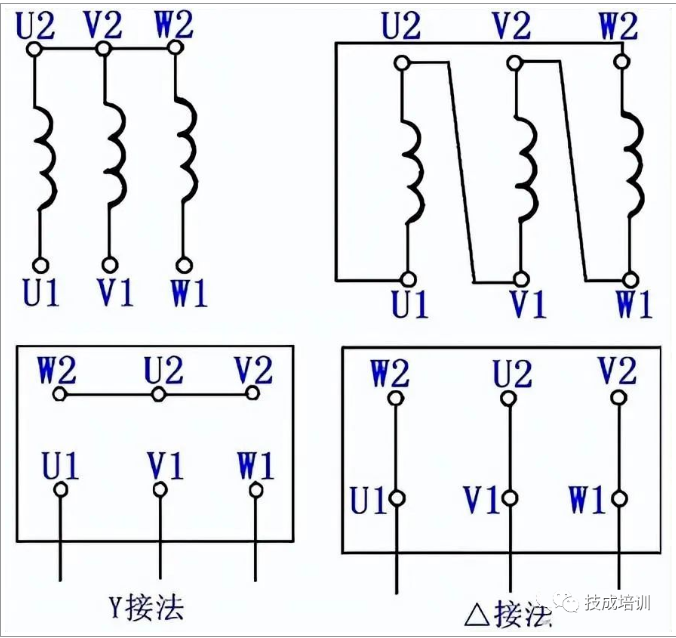
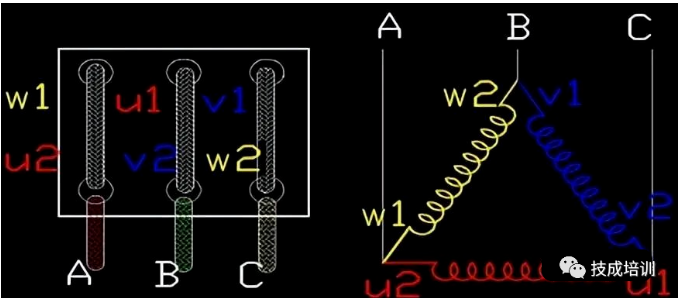
1. Kolmiokolmiokytkentämenetelmä kolmivaiheisille asynkronisille moottoreille
Kolmiokolmiokytkentämenetelmä on yhdistää kolmen käämin päät ja päät peräkkäin kolmion muodostamiseksi kuvan osoittamalla tavalla:
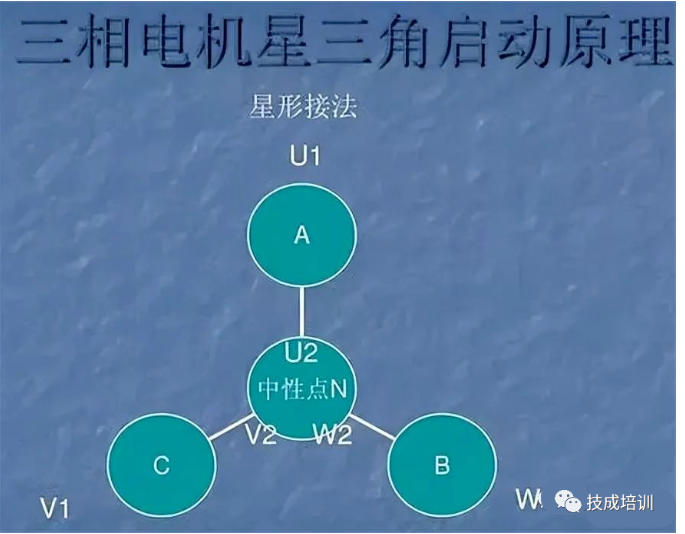
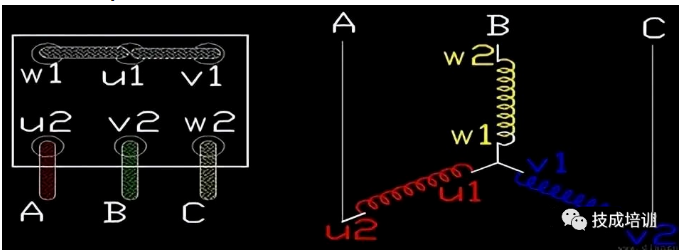
2. Tähtikytkentämenetelmä kolmivaiheisille asynkronisille moottoreille
Tähtikytkentätapa on yhdistää kolmen käämin taka- tai päätypäät, ja kolmea muuta johdinta käytetään teholiitäntöinä. Liitäntämenetelmä kuvan mukaisesti:
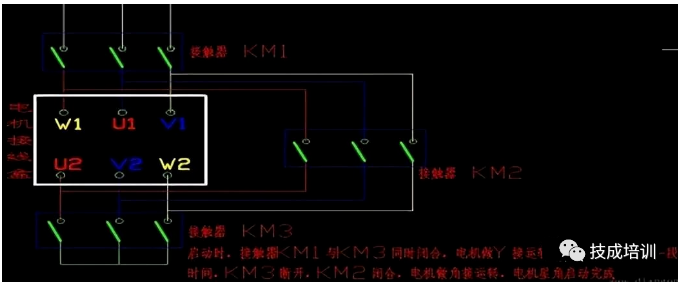
Kolmivaiheisen asynkronisen moottorin kytkentäkaavion selitys kuvissa ja tekstissä
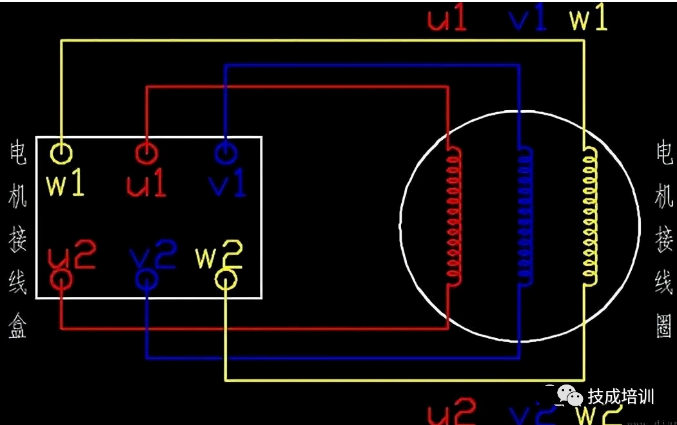
Kolmivaihemoottorin kytkentärasia
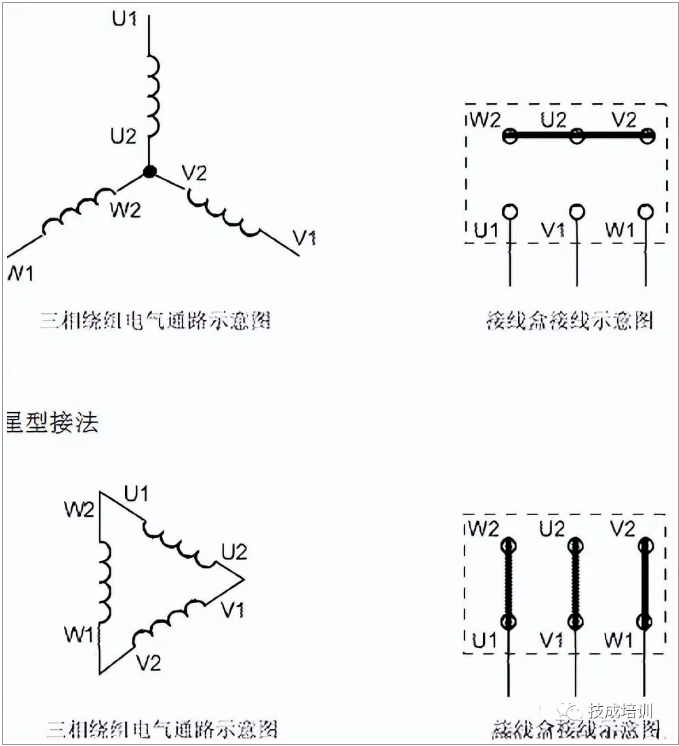
Kun kolmivaiheinen asynkroninen moottori on kytketty, kytkentärasian liitäntäkappaleen kytkentätapa on seuraava:
Kun kolmivaiheinen asynkroninen moottori on kulmakytketty, kytkentärasian liitäntäkappaleen kytkentätapa on seuraava:
Kolmivaiheisille asynkronimoottoreille on olemassa kaksi liitäntätapaa: tähtiliitäntä ja kolmioliitäntä.
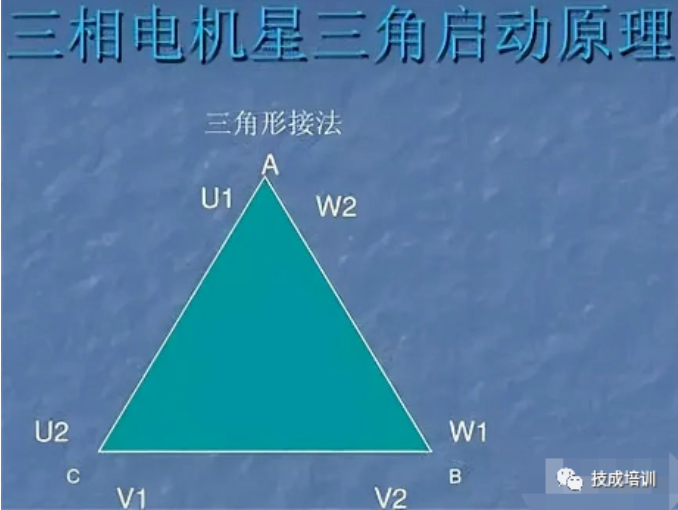
Triangulaatiomenetelmä
Käämikeloissa, joilla on sama jännite ja johdon halkaisija, tähtikytkentämenetelmällä on kolme kertaa vähemmän kierroksia vaihetta kohden (1,732 kertaa) ja kolme kertaa vähemmän tehoa kuin kolmioliitäntämenetelmässä. Valmiin moottorin kytkentätapa on vahvistettu kestämään 380 V:n jännitettä, eikä se yleensä sovellu muunnettavaksi.
Kytkentätapaa voidaan muuttaa vain, kun kolmivaiheinen jännitetaso poikkeaa normaalista 380 V:sta. Esimerkiksi kun kolmivaiheinen jännitetaso on 220 V, voidaan soveltaa alkuperäisen kolmivaiheisen 380 V jännitteen tähtikytkentämenetelmän vaihtamista kolmioliitäntämenetelmään; Kun kolmivaiheinen jännitetaso on 660V, alkuperäinen kolmivaihejännite 380V kolmiokytkentätapa voidaan vaihtaa tähtikytkentätapaan ja sen teho pysyy ennallaan. Yleensä pienitehoiset moottorit on kytketty tähtiin, kun taas suuritehoiset moottorit on kytketty kolmioon.
Nimellisjännitteellä tulee käyttää kolmiokytkettyä moottoria. Jos se vaihdetaan tähtikytketyksi moottoriksi, se kuuluu alennettuun jännitteeseen, mikä johtaa moottorin tehon ja käynnistysvirran laskuun. Suuritehoista moottoria käynnistettäessä (kolmiokytkentämenetelmä) virta on erittäin korkea. Käynnistysvirran vaikutuksen vähentämiseksi linjaan käytetään yleensä alennettua käynnistystä. Yksi tapa on vaihtaa alkuperäinen kolmiokytkentätapa tähtikytkentätavaksi käynnistystä varten. Kun tähtiyhteysmenetelmä on käynnistetty, se muunnetaan takaisin delta-yhteysmenetelmäksi käyttöä varten.
Kolmivaiheisen asynkronisen moottorin kytkentäkaavio
Kolmivaiheisten asynkronisten moottoreiden myötä- ja taaksepäin siirtolinjojen fyysinen kaavio:
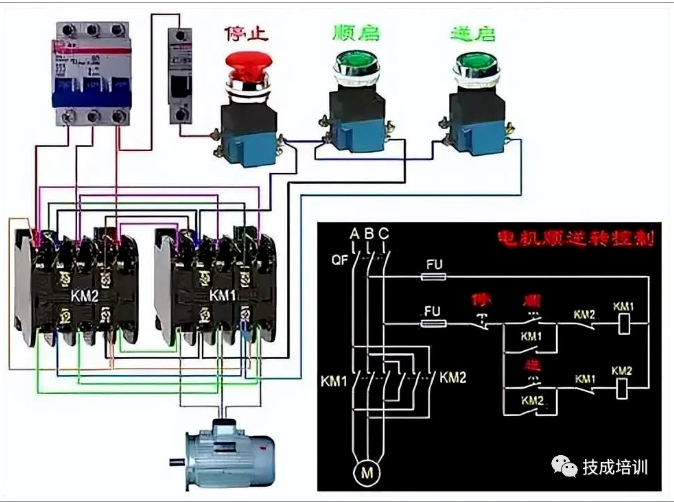
Moottorin eteen- ja taaksepäin ohjauksen saavuttamiseksi mitä tahansa kaksi sen virtalähteen vaihetta voidaan säätää suhteessa toisiinsa (kutsumme sitä kommutaatioksi). Yleensä V-vaihe pysyy muuttumattomana ja U-vaihe ja W-vaihe säädetään suhteessa toisiinsa. Jotta varmistetaan, että moottorin vaihejärjestys voidaan vaihtaa luotettavasti kahden kontaktorin toimiessa, johdotuksen tulee olla johdonmukainen koskettimen yläportissa ja vaihetta tulee säätää kontaktorin alemmassa portissa. Kahden vaiheen vaihejärjestyksen vaihdon vuoksi on varmistettava, että kahta KM-käämiä ei voi kytkeä päälle samanaikaisesti, muuten voi esiintyä vakavia vaiheiden välisiä oikosulkuvikoja. Siksi lukitus on otettava käyttöön.
Turvallisuussyistä käytetään usein kaksoislukittua eteen- ja taaksepäin ohjauspiiriä, jossa on painikelukitus (mekaaninen) ja kontaktorilukitus (sähköinen); Käytettäessä näppäinlukitusta, vaikka eteen- ja taaksepäin painikkeita painettaisiin samanaikaisesti, kahta vaihesäädössä käytettävää kontaktoria ei voida kytkeä päälle samanaikaisesti, jolloin vältetään mekaanisesti vaiheiden väliset oikosulut.
Lisäksi käytettyjen kontaktorien lukituksesta johtuen, niin kauan kuin yksi kontaktoreista on päällä, sen pitkä suljettu kosketin ei sulkeudu. Tällä tavalla mekaanista ja sähköistä kaksoislukitusta käytettäessä moottorin virransyöttöjärjestelmässä ei voi olla vaiheen välisiä oikosulkuja, mikä suojaa moottoria tehokkaasti ja välttää onnettomuudet, jotka aiheutuvat vaihe-oikosulkuista vaihemoduloinnin aikana, mikä voi polttaa kontaktori.
Postitusaika: 07.08.2023


