
Puhtaasti sähköauton rakenne ja muotoilu eroavat perinteisestä polttomoottorikäyttöisestä ajoneuvosta. Se on myös monimutkainen järjestelmäsuunnittelu. Siinä on integroitava tehoakkutekniikka, moottorikäyttötekniikka, autotekniikka ja moderni ohjausteoria optimaalisen ohjausprosessin saavuttamiseksi. Sähköajoneuvojen tieteen ja teknologian kehityssuunnitelmassa maa jatkaa T&K-asettelun noudattamista "kolme pystysuoraa ja kolme vaakasuuntaa" ja korostaa edelleen "kolmen horisontaalisen" yhteisten avainteknologioiden tutkimusta teknologian muutosstrategian mukaisesti. "puhdas sähkökäyttö", eli käyttömoottorin ja sen ohjausjärjestelmän, tehoakun ja sen hallintajärjestelmän sekä voimansiirron ohjausjärjestelmän tutkimus. Jokainen suuri valmistaja laatii oman liiketoiminnan kehittämisstrategiansa kansallisen kehitysstrategian mukaisesti.
Kirjoittaja selvittää keskeiset teknologiat uuden energiavoimansiirron kehitysprosessissa ja tarjoaa teoreettisen pohjan ja referenssin voimansiirron suunnittelulle, testaamiselle ja tuotannolle. Suunnitelma on jaettu kolmeen lukuun, joissa analysoidaan sähköajon avainteknologioita puhtaiden sähköajoneuvojen voimansiirrossa. Tänään esittelemme ensin sähkökäyttöteknologioiden periaatteen ja luokituksen.
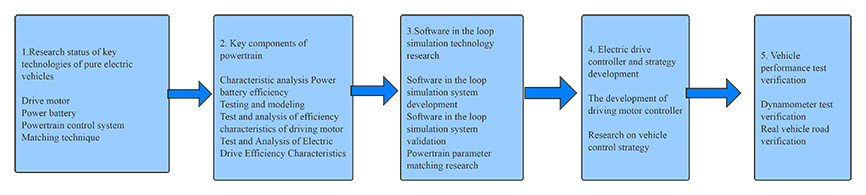
Kuva 1 Tärkeimmät linkit voimansiirron kehityksessä
Tällä hetkellä puhtaan sähköajoneuvojen voimansiirron ydinteknologiat sisältävät seuraavat neljä luokkaa:
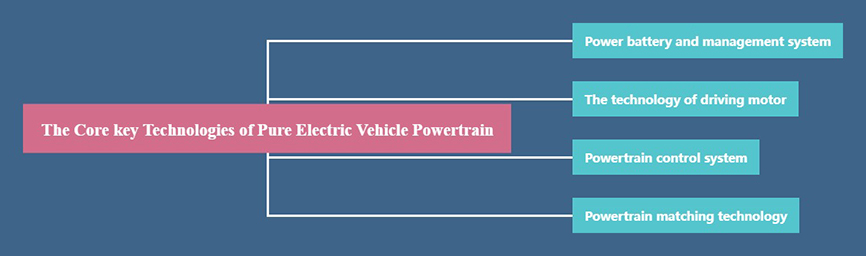
Kuva 2 Voimansiirron keskeiset avainteknologiat
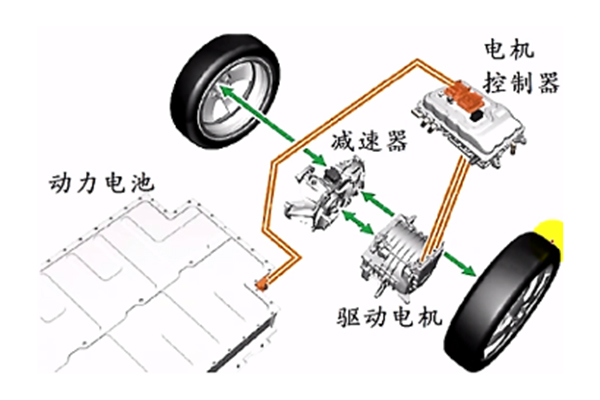
Ajomoottorijärjestelmän määritelmä
Ajoneuvon tehon akun tilan ja ajoneuvon tehovaatimusten mukaan se muuntaa ajoneuvossa olevan energiavarastolaitteen tuottaman sähköenergian mekaaniseksi energiaksi ja energia välittyy vetopyörille lähetyslaitteen ja osien kautta. ajoneuvon mekaanisesta energiasta muunnetaan sähköenergiaksi ja syötetään takaisin energian varastointilaitteeseen ajoneuvoa jarrutettaessa. Sähkökäyttöinen ajojärjestelmä sisältää moottorin, voimansiirtomekanismin, moottoriohjaimen ja muita komponentteja. Sähköenergian ajojärjestelmän teknisten parametrien suunnittelu sisältää pääasiassa tehon, vääntömomentin, nopeuden, jännitteen, vähennyksen siirtosuhteen, virtalähteen kapasitanssin, lähtötehon, jännitteen, virran jne.

1) Moottorin ohjain
Kutsutaan myös invertteriksi, se muuttaa tehoakun tasavirran tulon vaihtovirraksi. Pääkomponentit:
◎ IGBT: tehoelektroniikkakytkin, periaate: ohjaa ohjaimen kautta IGBT-siltavartta sulkeaksesi tietyn taajuuden ja sekvenssikytkintä kolmivaiheisen vaihtovirran luomiseksi. Vaihtojännite voidaan muuntaa ohjaamalla tehoelektroniikkakytkintä sulkeutumaan. Sitten AC-jännite muodostetaan ohjaamalla käyttöjaksoa.
◎ Kalvon kapasitanssi: suodatustoiminto; virta-anturi: havaitsee kolmivaiheisen käämin virran.
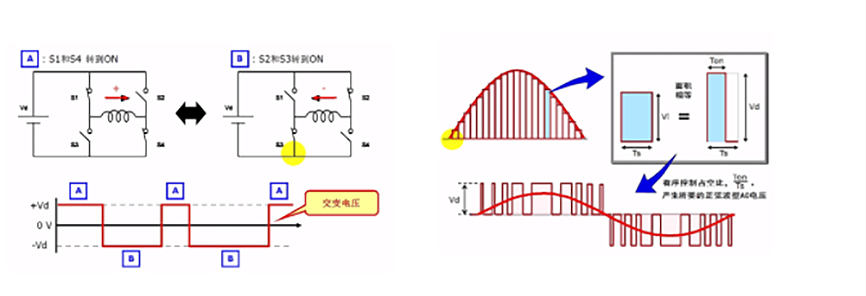
2) Ohjaus- ja ohjauspiiri: tietokoneen ohjauskortti, ajo-IGBT
Moottoriohjaimen tehtävänä on muuntaa tasavirta AC:ksi, vastaanottaa jokainen signaali ja tuottaa vastaava teho ja vääntömomentti. Ydinkomponentit: tehoelektroniikkakytkin, kalvokondensaattori, virta-anturi, ohjausohjauspiiri eri kytkimien avaamiseen, virtojen muodostamiseen eri suuntiin ja vaihtojännitteen tuottamiseen. Siksi voimme jakaa sinimuotoisen vaihtovirran suorakulmioihin. Suorakulmioiden pinta-ala muunnetaan samankorkeaksi jännitteeksi. X-akseli toteuttaa pituussäädön ohjaamalla käyttöjaksoa ja lopulta toteuttaa vastaavan alueen muunnoksen. Tällä tavalla tasavirtaa voidaan ohjata sulkemaan IGBT-siltavarsi tietyllä taajuudella ja sekvenssikytkintä ohjaimen kautta kolmivaiheisen vaihtovirran muodostamiseksi.
Tällä hetkellä käyttöpiirin keskeiset komponentit riippuvat tuonnista: kondensaattorit, IGBT/MOSFET-kytkinputket, DSP, elektroniset sirut ja integroidut piirit, jotka voidaan valmistaa itsenäisesti, mutta joiden kapasiteetti on heikko: erikoispiirit, anturit, liittimet, joita voidaan valmistaa itsenäisesti valmistettu: virtalähteet, diodit, induktorit, monikerroksiset piirilevyt, eristetyt johdot, patterit.
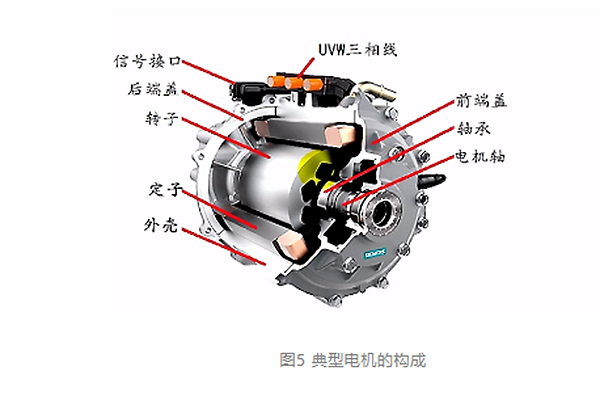
3) Moottori: muuntaa kolmivaiheisen vaihtovirran koneeksi
◎ Rakenne: etu- ja takapään kannet, kuoret, akselit ja laakerit
◎ Magneettipiiri: staattorin sydän, roottorin sydän
◎ Piiri: staattorin käämitys, roottorin johdin
4) Lähetyslaite
Vaihteisto tai alennusvaihde muuttaa moottorin tuottaman vääntömomentin koko ajoneuvon vaatimaksi nopeudeksi ja vääntömomentiksi.
Ajomoottorin tyyppi
Käyttömoottorit on jaettu seuraaviin neljään luokkaan. Tällä hetkellä AC-oikosulkumoottorit ja kestomagneettisynkronimoottorit ovat yleisimpiä uuden energian sähköajoneuvoja. Joten keskitymme AC-oikosulkumoottorin ja kestomagneettisynkronisen moottorin tekniikkaan.
| DC moottori | AC induktiomoottori | Kestomagneettinen synkroninen moottori | Kytketty reluktanssimoottori | |
| Etu | Halvemmat kustannukset, alhaiset ohjausjärjestelmän vaatimukset | Alhaiset kustannukset, laaja tehokattavuus, kehittynyt ohjaustekniikka, korkea luotettavuus | Suuri tehotiheys, korkea hyötysuhde, pieni koko | Yksinkertainen rakenne, alhaiset ohjausjärjestelmän vaatimukset |
| Epäkohta | Korkeat huoltovaatimukset, alhainen nopeus, pieni vääntömomentti, lyhyt käyttöikä | Pieni tehokas alueAlhainen tehotiheys | Korkeat kustannukset Huono sopeutumiskyky ympäristöön | Suuri vääntömomentin vaihteluKorkea työmelu |
| Sovellus | Pieni tai minihidas sähköauto | Sähkökäyttöiset yritysajoneuvot ja henkilöautot | Sähkökäyttöiset yritysajoneuvot ja henkilöautot | Seosmoottoriajoneuvo |
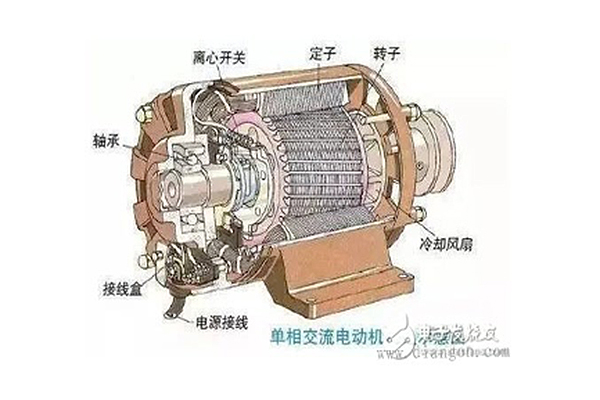 1) Asynkroninen vaihtovirtamoottori
1) Asynkroninen vaihtovirtamoottori
AC-induktiivisen asynkronisen moottorin toimintaperiaate on, että käämitys kulkee staattorin uran ja roottorin läpi: se on pinottu ohuilla teräslevyillä, joilla on korkea magneettinen johtavuus. Kolmivaiheinen sähkö kulkee käämin läpi. Faradayn sähkömagneettisen induktiolain mukaan syntyy pyörivä magneettikenttä, minkä vuoksi roottori pyörii. Staattorin kolme käämiä on kytketty 120 asteen välein ja virtaa kuljettava johdin synnyttää magneettikenttiä niiden ympärille. Kun kolmivaiheinen virransyöttö kytketään tähän erikoisjärjestelyyn, magneettikentät muuttuvat eri suuntiin vaihtovirran muuttuessa tietyllä hetkellä, jolloin syntyy tasaisen pyörimisintensiteetin magneettikenttä. Magneettikentän pyörimisnopeutta kutsutaan synkroniseksi nopeudeksi. Oletetaan, että sisään sijoitetaan suljettu johdin Faradayn lain mukaan, koska magneettikenttä on muuttuva, Silmukka havaitsee sähkömotorisen voiman, joka synnyttää virran silmukassa. Tämä tilanne on aivan kuin virtaa kuljettava silmukka magneettikentässä, joka tuottaa sähkömagneettista voimaa silmukkaan ja Huan Jiang alkaa pyöriä. Käyttämällä jotain oravanhäkin kaltaista kolmivaiheinen vaihtovirta tuottaa pyörivän magneettikentän staattorin läpi ja virta indusoituu päätyrenkaan oikosuljetussa oravanhäkin tangossa, jolloin roottori alkaa pyöriä, mikä on miksi moottoria kutsutaan induktiomoottoriksi. Sähkömagneettisen induktion avulla sen sijaan, että se olisi kytketty suoraan roottoriin sähkön indusoimiseksi, eristävät rautasydänhiutaleet täytetään roottoriin niin, että pienikokoinen rauta varmistaa pienimmän pyörrevirtahäviön.
2) AC-synkroninen moottori
Synkronisen moottorin roottori on erilainen kuin asynkronisen moottorin roottori. Kestomagneetti on asennettu roottoriin, joka voidaan jakaa pinta-asennettavaan ja upotettuun tyyppiin. Roottori on valmistettu piiteräslevystä ja kestomagneetti on upotettu. Staattori on myös kytketty vaihtovirralla, jonka vaihe-ero on 120, joka ohjaa siniaallon vaihtovirran kokoa ja vaihetta siten, että staattorin synnyttämä magneettikenttä on päinvastainen kuin roottorin synnyttämä magneettikenttä ja magneettinen kenttä pyörii. Tällä tavalla staattori vetää puoleensa magneetilla ja pyörii roottorin mukana. Jakso toisensa jälkeen syntyy staattorin ja roottorin absorptiosta.
Johtopäätös: Sähköajoneuvojen moottorikäytöstä on periaatteessa tullut valtavirtaa, mutta se ei ole yksittäinen vaan monipuolinen. Jokaisella moottorikäyttöjärjestelmällä on oma kattava indeksi. Jokaista järjestelmää sovelletaan olemassa olevaan sähköautokäyttöön. Suurin osa niistä on asynkronimoottoreita ja kestomagneettisynkronimoottoreita, kun taas jotkut yrittävät vaihtaa reluktanssimoottoreita. On syytä huomauttaa, että moottorikäyttö yhdistää tehoelektroniikkateknologian, mikroelektroniikkatekniikan, digitaalitekniikan, automaattisen ohjaustekniikan, materiaalitieteen ja muita tieteenaloja kuvastamaan useiden tieteenalojen kattavia sovellus- ja kehitysnäkymiä. Se on vahva kilpailija sähköajoneuvojen moottoreissa. Ollakseen paikkansa tulevaisuuden sähköajoneuvoissa kaikenlaisten moottoreiden on paitsi optimoitava moottorirakennetta, myös jatkuvasti tutkittava ohjausjärjestelmän älykkäitä ja digitaalisia puolia.
Postitusaika: 30.1.2023


